Une microélectronique embarquée dans des méduses augmente leur vitesse.
Le contrôle de la locomotion d’un animal peut permettre de réaliser des actions effectuées dans les systèmes de robotique dite « douce ». Des chercheurs de Stanford University, Stanford, California, USA, ont réussi à embarquer dans des méduses une microélectronique qui commande la nage de celles-ci. Pour multiplier la vitesse de la méduse par trois, elle n’exige qu’une puissance extérieure de 10 mW. Ceci permet de penser que des robots bio-hybrides auraient des performances adaptées à la surveillance des océans.
Les méduses, animaux pélagiques, sont répandues dans toutes les mers
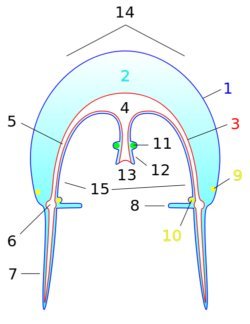 1 Ectoderme ; 2 Mésoglée ; 3 Endoderme ; 4 Estomac ; 5 Canal radial ; 6 Canal circulaire ; 7 Tentacule ; 8 Velum ; 9 Anneau nerveux externe ; 10 Anneau nerveux interne ; 11 Gonades ; 12 Manubrium ; 13 Bouche ; 14 Surface de l’ex-ombrelle ; 15 Surface de la sous-ombrelle.
1 Ectoderme ; 2 Mésoglée ; 3 Endoderme ; 4 Estomac ; 5 Canal radial ; 6 Canal circulaire ; 7 Tentacule ; 8 Velum ; 9 Anneau nerveux externe ; 10 Anneau nerveux interne ; 11 Gonades ; 12 Manubrium ; 13 Bouche ; 14 Surface de l’ex-ombrelle ; 15 Surface de la sous-ombrelle.Wikipedia. Domaine public. Xavier Vasquez
.
Les méduses consomment très peu d’énergie par unité de distance parcourue.
Elles constituent donc des modèles pour des robots de déplacement sous-marins. (cf le blog du 4 mai 2012 : Un robot sous-marin biomimétique en forme de méduse).
Mais ces robots mécaniques qui imitent poissons et méduses consomment 10 à 1000 fois plus d »énergie pour la propulsion que ces derniers.
De l’intérêt d’utiliser directement la biologie dans la robotique
En prenant des méduses vivantes comme véhicules marins, les chercheurs ont utilisé le métabolisme basal de celles-ci à plusieurs titres :
– réduire la consommation d’énergie.
-se servir de leurs muscles pour réaliser les actions souhaitées.
-pouvoir compter sur leurs propriétés d’auto-guérison et de régénération face aux accidents possibles.
Pour ces raisons, et bien que des études supplémentaires s’avèrent nécessaires pour augmenter leur manœuvrabilité, ces « biorobots » surpassent les robots nageurs déjà réalisés.
Les méduses ont des habitats dont les salinités, les températures, les concentrations d’oxygène et les profondeurs sont extrêmement variées. Ceci permet de déployer ces biorobots à travers tous les océans. Leur utilisation contrôlée pourra augmenter considérablement le nombre des données d’observations océaniques.
Mais ils pourront aussi fournir des données scientifiques sur l’interaction de l’animal avec le milieu fluide qui l’entoure. Le mouvement est nécessaire à la méduse pour se nourrir, échapper à ses prédateurs et se reproduire. Le contrôle de sa nage permet d’envisager un large domaine d’études de la biologie et de l’écologie de son déplacement en laboratoire et dans des expériences in situ dans la mer.
Le système de contrôle de la nage de la méduse Aurella aurita
A. aurita est une méduse constituée d’une ombrelle aplatie munie d’une monocouche de muscles coronaux et radiaux recouvrant sa sous-ombrelle. Ces muscles, en se contractant, font éjecter de l’eau par l’ombrelle, propulsant ainsi l’animal. Les impulsions nerveuses commandant ces contractions sont envoyées sur l’un des huit sites récepteurs situés dans des organes sensoriels, les rhopalies, réparties au bord de l’ombrelle (Fig.1. ci-dessous).
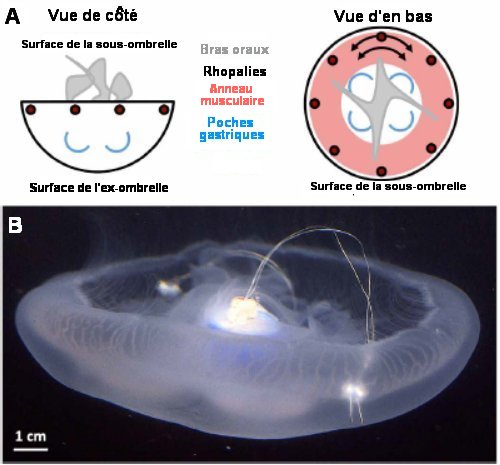
Fig.1. Le contrôle de la nage d’A. aurita
A) Schéma simplifié de l’anatomie d’A. aurita avec la sous-ombrelle, l’ex-ombrelle, les rhopalies, l’anneau musculaire et les poches gastriques.
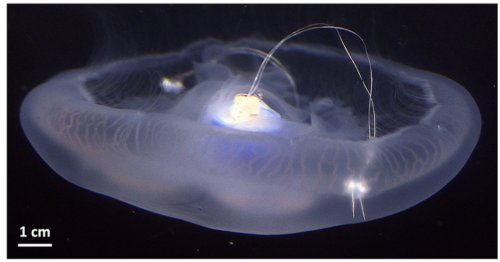
B) Photographie d’une méduse en nage libre, sous-ombrelle vers le haut, munie d’un contrôleur de nage (ici inactif). Sa tige support en bois est placée dans le manubrium. Deux électrodes sont insérées dans l’anneau musculaire et la mésoglée au bord de l’ombrelle.
Tiré de Low-power microelectronics embedded in live jellyfish enhance propulsion
Nicole W. Xu and John O. Dabiri
Science Advance. 2020; 6 : eaaz3194 29 January 2020
License 4.0 (CC BY-NC).
La microélectronique et son implémentation dans la méduse vivante
Les chercheurs ont mis au point un contrôleur de nage microélectronique autonome comprenant un minuscule microprocesseur et une pile au lithium. Il fabrique une impulsion électrique carrée d’une amplitude de 3,7 V et d’une durée de 10 ms. La fréquence de répétition de cette impulsion est réglable de 0,25 à 1,00 Hz. Deux électrodes en platines insérées dans la méduse sonr reliées au contrôleur par des conducteurs en série avec des DEL visualisant le signal électrique.
La fig.2. présente le montage et ses différents éléments.
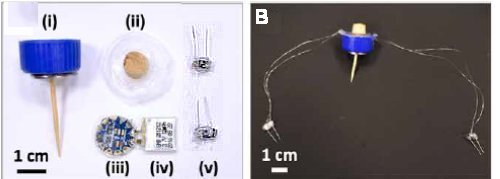
Fig.2. Eléments du contrôleur de nage.
A)
(i) Cylindre en polypropylène fixé à une tige de bois
(ii) Film plastique pour rendre étanche le montage
(iii) Microprocesseur miniature
(iv) Pile lithium-ion polymère
(v) Electrodes en platine avec DELs de visualisation
B)
Vue de l’ensemble du montage
Tiré de Low-power microelectronics embedded in live jellyfish enhance propulsion
Nicole W. Xu and John O. Dabiri
Science Advance. 2020; 6 : eaaz3194 29 January 2020
License 4.0 (CC BY-NC).
Les électrodes sont insérées de deux côtés opposés dans le tissu de la sous-ombrelle à mi-chemin entre le bord de l‘ombrelle et le centre de l’animal.
Le poids de l’élément est compensé par du liège pour rendre l’ensemble approximativement flottable.
La vitesse de nage des méduses équipées du contrôleur
On a mesuré les vitesses de nage de méduses équipées de contrôleur dans un bac d’eau salée de dimensions 1,8 m x 0,9 m x 0,9m. On introduit les méduses au sommet du bac et on les filme dans leur nage vers son fond. Ceci est effectué à diverses fréquences d’excitation allant de 0 Hz (contrôleur inactif, impulsions endogènes, dues à la seule méduse) jusqu’à 1,1 Hz.
Ce domaine de fréquence correspond à celui des fréquences endogènes.
Les vitesses de nage mesurées sont comparées à la vitesse à 0 Hz, c’est-à-dire sans stimulation.
La vitesse maxima observée a été de 2,8 fois la vitesse naturelle de nage de A. aurita.
La fréquence de stimulation ne peut être augmentée au-dessus de 1,1 Hz car, à chaque contraction, il faut laisser un temps suffisant au muscle pour se relâcher avant l’impulsion suivante.
Le contrôleur microélectronique du biorobot constitué par la méduse qui en est équipée consomme 0,06 W/kg à 0,25Hz, 0,13 W/kg à 0,50 Hz et 0,13 W/kg à 0,88 Hz.
Comparé aux robots existants, il utilise 1000 fois moins de puissance externe ( ici de la pile) par masse de biorobot, comprenant celle de l’animal et celle du contrôleur.
La déformation géométrique de l’ombrelle durant la nage est du même ordre pour la nage libre ou la nage contrôlée.
C’est ce que montre la vidéo ci-après.
A gauche, on voit une méduse non stimulée ayant un contrôleur inactif, au milieu une méduse avec une nage contrôlée à 0,5 Hz et à droite une méduse avec une nage contrôlée à 0,88 Hz.
On remarque que l’amplitude entre contraction et relaxation de l’ombrelle est plus faible à haute fréquence (à droite)
Tiré de Low-power microelectronics embedded in live jellyfish enhance propulsion
Nicole W. Xu and John O. Dabiri
Science Advance. 2020; 6 : eaaz3194 SM 29 January 2020
License 4.0 (CC BY-NC)
L’augmentation de vitesse observée sur A. aurita suggère que cette espèce a des capacités de nage inattendues qui n’entraînent pas une consommation d’énergie animale disproportionnée.
Cette réserve latente de performance peut être exploitée dans des applications robotiques. Mais la principale limitation reste celle de l’énergie consommée par la microélectronique. De futures améliorations de celle-ci pourront diminuer le coût énergétique et aussi, en supprimant les contractions animales endogènes sans nuire aux organismes utilisés, augmenter la précision du contrôle de ces biorobots qui utilisent des animaux vivants.
Pour en savoir plus :
Low-power microelectronics embedded in live jellyfish enhance propulsion
Nicole W. Xu and John O. Dabiri
Science Advance. 2020; 6 : eaaz3194 29 January 2020.


