Imagerie 3D par des échos de réflexions multiples
De nombreux animaux, tels les chauves-souris et les dauphins, émettent pour détecter et localiser un obstacle ou une proie des impulsions de son (ou ultrason) dont ils reçoivent l’écho. Cette écholocation n’est généralement possible que si 2 ou plusieurs détecteurs sont utilisés.
Le radar fonctionne d’une manière analogue avec des ondes électromagnétiques de haute fréquence. Celles-ci sont émises par impulsions par une antenne tournante qui balaye l’espace. Leur temps de retour est mesuré et corrélé avec la direction dans laquelle elles sont détectées.
Déterminer la position spatiale d’objets et former leur image à partir d’ondes et de leurs échos à l’aide d’un seul détecteur fixe pose un problème de traitement des données par le calcul bien plus difficile.
C’est ce qu’ont résolu des chercheurs de l’University of Glasgow, Glasgow, Angleterre, en utilisant aussi bien des ondes radio fréquence (RF) que des ondes acoustiques.
Ils ont montré empiriquement que des groupes d’objets à trois dimensions peuvent être reconstruits à partir d’échos temporels. Ils ont utilisé des échos d’ondes réfléchies plusieurs fois par les murs de la pièce et les objets qu’elle contient.
Echos multi-temporels à trajets multiples
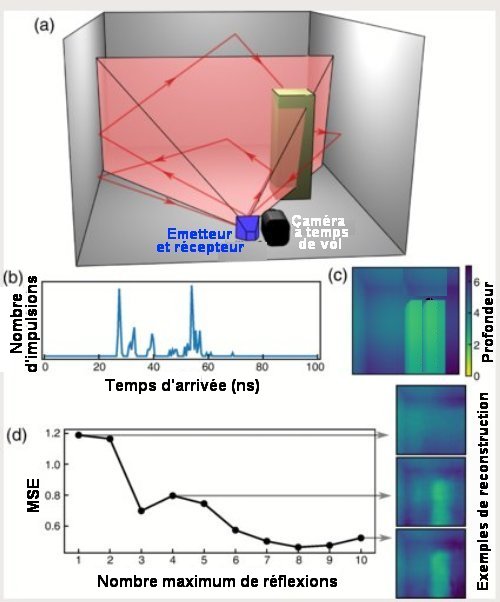
On a représenté sur la Fig.1. un schéma de la méthode utilisée. Une source émet par impulsions des ondes divergentes sous un grand angle afin d’éclairer toute la scène à imager. Les impulsions émises sont réfléchies par les murs de la pièce et les objets qu’elle contient. Elles sont enfin détectées par un senseur à pixel unique qui peut en outre mesurer avec une forte résolution à quel temps arrive une impulsion ; on obtient ainsi un histogramme temporel. A partir de celui-ci, un réseau neuronal reconstitue l’image.
Fig.1. Schéma conceptuel de la méthode utilisée
a) Visualisation 3D du système physique. Un objet prismatique (en jaune) se déplace dans une pièce/ Des rayons sont émis dans un volume pyramidal et éclairent la scène. Les flèches rouges montrent des réflexions multiples qui atteignent finalement le détecteur (en bleu) qui enregistre leur temps d’arrivée.
b) Un exemple d’histogramme temporel.
c) Image 3D avec un codage couleur de la distance.
d) Erreur quadratique moyenne (MSE en anglais) en fonction du nombre de réflexions. Elle est calculée entre la vraie image D et la reconstruction par réseau neuronal. Les vignettes de droite montrent des exemples de reconstruction d’image obtenus avec une, quatre et dix réflexions.
Tiré de ” 3D Imaging from Multipath Temporal Echoes Alex Turpin , Valentin Kapitany , Jack Radford , Davide Rovelli , Kevin Mitchell, Ashley Lyons, Ilya Starshynov, and Daniele Faccio, PHYSICAL REVIEW LETTERS 126, 174301 (2021) ” Copyright American Physical Society ” avec autorisation.
On peut parfaitement prédire mathématiquement l’histogramme obtenu par réflexions multiples d’impulsions d’onde si l’on connaît complètement la distribution des objets et les dimensions de la pièce les contenant. En revanche, résoudre le processus inverse- c’est-à-dire reconstruire en 3 dimensions les objets à partir des impulsions réfléchies, présente une ambiguïté mathématique.
Pour la lever, les chercheurs ont utilisé non seulement la première réflexion, mais aussi une deuxième, une troisième, voire plus.
Ils utilisent un algorithme d’apprentissage profond qui est entraîné par des images de la pièce vide obtenues avec une caméra à temps de vol et par celles obtenues par des échos temporels aussi bien en ondes RF qu’en ondes acoustiques.
Elle illumine les sujets avec des éclairs brefs de lumière et calcule le temps mis par chaque éclair pour aller de la caméra à l’objet (temps de vol). L’illumination est obtenue par un ensemble de DELs ou de diodes laser, généralement dans l’infrarouge. Cette mesure est effectuée pour chaque pixel. Les temps de vol mesurés sont de l’ordre de la picoseconde, d’où la nécessité de composants et d’une électronique spéciaux et onéreux.
Après l’apprentissage, les images finales sont obtenues par l’analyse des échos temporels, soit en ondes RF, soit en ondes acoustiques. La caméra temps de vol n’est plus utilisée.
C’est avec 2 différentes sources d’ondes, à savoir des ondes électromagnétiques de fréquence de l’ordre du GHz et des impulsions acoustiques de l’ordre du KHz qu’ont été menées les expériences avec un humain se déplaçant dans une pièce de dimensions approximatives 3m x 4m x 2,5m.
Les échos des ondes RF sont enregistrés en parallèle avec des images 3 D de la caméra temps de vol pour constituer l’apprentissage du logiciel à réseau neuronal. Pour l’apprentissage en ondes acoustiques, l’émetteur RF est remplacé par un haut-parleur et le récepteur par un microphone. Par la suite, les mesures tant RF qu’acoustiques seront effectuées sans la caméra temps de vol qui n’aura servi qu’à l’apprentissage.
Dans les deux vidéos suivantes on peut voir, pour la première des images animées 3D obtenues en ondes RF, pour la seconde celles obtenues en ondes acoustiques, toujours sans caméra temps de vol.
Vidéo obtenue à l’aide d’échos d’ondes électromagnétiques RF
Les 4 premières vignettes correspondent à des histogrammes
temporels tronqués à des temps de plus en plus élevés,
donc à un nombre croissant d’échos. La vignette de gauche est
une image animée de référence obtenue avec la caméra temps de vol.
Vidéo obtenue à l’aide d’échos d’ondes acoustiques
Les 4 premières vignettes correspondent à des histogrammes
temporels tronqués à des temps de plus en plus élevés,
donc à un nombre croissant d’échos. La vignette de gauche est
une image animée de référence obtenue avec la caméra temps de vol.
Ces deux vidéos sont tirées de ” 3D Imaging from Multipath Temporal Echoes Alex Turpin , Valentin Kapitany , Jack Radford , Davide Rovelli , Kevin Mitchell, Ashley Lyons, Ilya Starshynov, and Daniele Faccio, PHYSICAL REVIEW LETTERS 126, 174301 (2021) ,Supplemental Material ” Copyright American Physical Society ” avec autorisation.
Ces résultats démontrent que des échos multi-temporels traités avec un logiciel d’apprentissage profond peuvent fournir des images 3 D.
Une première application est celle de l’imagerie en lieux clos, ces derniers fournissant efficacement des échos multiples. Elle simplifierait, par exemple, la surveillance de malades dans des hôpitaux ou en ville.
Des perfectionnements pourraient être à même de généraliser le procédé à des arrière-plans dynamiques, à des scènes de plein air ou encore à l’obtention d’ informations imagées sous différents angles de vue.
Pour en savoir plus :
” 3D Imaging from Multipath Temporal Echoes Alex Turpin , Valentin Kapitany , Jack Radford , Davide Rovelli , Kevin Mitchell, Ashley Lyons, Ilya Starshynov, and Daniele Faccio,
PHYSICAL REVIEW LETTERS 126, 174301 (2021) “

