Des microrobots biohybrides pour purifier les eaux des nano et micro plastiques
Les plastiques sont des polymères synthétiques, formés de monomères liés par de fortes liaisons covalentes. Ils ont d’excellentes propriétés de stabilité chimique et thermiques. Mais leur élimination aprés usage ou leur recyclage pose problème.
Les déchets plastiques déversés dans l’environnement se fragmentent en micro (< (<5 mm) et nano (< 1000 nm) plastiques et se retrouvent dans les eaux. Il est bien difficile par les méthodes traditionnelles de les éliminer.
Une équipe de chercheurs de la Brno Uuniversity of Technology, Brno, République Tchèque, de la Mendel University in Brno, Brno, République Tchèque, de la Technical University of Ostrava, Ostrava, République Tchèque associée à la China Medical University, Taichung, Taiwan et à la Yonsei University, Seoul, Corée du Sud ont conçu un système de micro-robots biohybrides utilisant les propriétés magnétiques de Fe3O4 pour récupérer les micro et nano morceaux de plastique.
Les microplastiques ont tendance à se poser et s’accumuler au fond des eaux. Les nanoplastiques restent en suspension dans l’eau.En outre, en raison de leur fort rapport surface/volume, ils peuvent absorber des substances toxiques. Dans le domaine maritime, où aboutissent grand nombre de ces déchets, ils peuvent être ingérés par les poissons et d’autres organismes aquatiques. Ceux-ci peuvent alors voir attaquer leurs processus digestifs ou reproductifs, conduisant à la raréfaction ou l’extinction de certaines espèces
Les systèmes conventionnels de filtration ont une efficacité faible en raison des petites dimensions de ces déchets.
Des systèmes de microrobots plus ou moins compliqués ont été proposés pour récupérer ces micro-objets mais leur coût ou le risque de contamination dans le cas de ceux utilisant des carburants chimique en ont empêché le développement.
Les microrobots biohybrides proposés par les chercheurs tchèques sont basés sur des cellules d’algue munies de nanoparticules magnétiques permettant une capture active des micro et nanoplastiques et son extraction des eaux contaminées.
Utilisation d’une micro algue
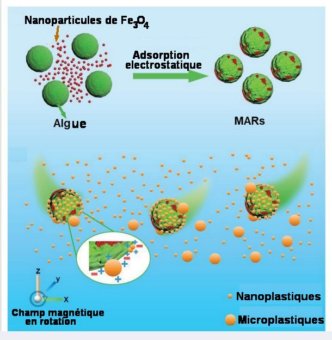
L’algue Chlorella vulgaris (C. vulgaris), une des plus importantes microalgues utilisées en biotechnologie a été choisie comme plateforme de micro robots (Fig.1.). En fixant des nanoparticules de tétroxyde de trifer Fe3O4 à la surface de cellules de cette algue par interaction électrostatique, on obtient des microrobots algues magnétiques( en anglais magnetic algae robots, MARs ) pouvant être déplacés par un champ magnétique extérieur sans liaison filaire.
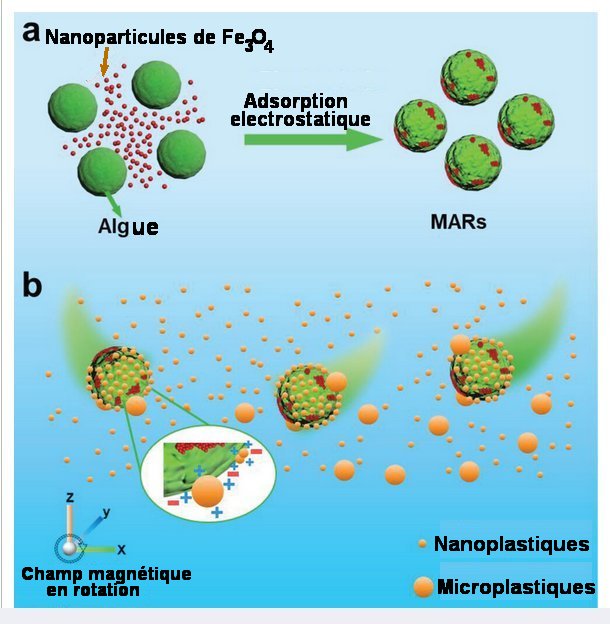
Fig.1. MARs biohybrides pour l’extraction efficace des micro/nanoplastiques des eaux.
a) Des celllules nues d’algue ayant à leur surface des nano-particules de Fe3O4 maintenues par adsorption électrostatique.
b) En utilisant la rotation due au champ magnétique et les interactions électrostatiques les MARs facilitent la récupération des nano et micro plastiques en les fixant à leur surface.
Tiré de Biohybrid Magnetically Driven Microrobots for Sustainable Removal of Micro/Nanoplastics from the Aquatic Environment Xia Peng, Mario Urso, Martina Kolackova, Dalibor Huska, and Martin Pumera
Adv. Funct. Mater. 2024, 34, 2307477 Open Accessv
On peut facilement mettre en mouvement les MARs avec un champ magnétique. La concentration de Fe3O4 optimum est de 0,3 mg/ml. Elle a l’avantage d’avoir un effet positif sur la reproduction de l’algue et aucun effet toxique. En outre, à cette concentration, il reste peu de particules de Fe3O4 à ne pas être fixées sur les algues, tandis qu’à plus haute concentration, il existe une surcharge des cellules d’algue en particules Fe3O4 et un excès de ces dernières non liées à une cellule d’algue.
Les cellules originelles C. vulgaris ont un mouvement brownien incontrôlé. Au contraire, si elles ont « décorées« de Fe3O4 , les excellentes propriétés magnétiques qui leur sont conférées permettent de les manipuler, par exemple avec un champ magnétique en rotation. Le mouvement que ce dernier leur imprime aide à la capture des micro et nano plastiques. En outre, un champ magnétique permanent permet de récupérer ces derniers fixés sur les algues.
La figure suivante illustre l’intérêt de la mise en mouvement par le champ magnétique.
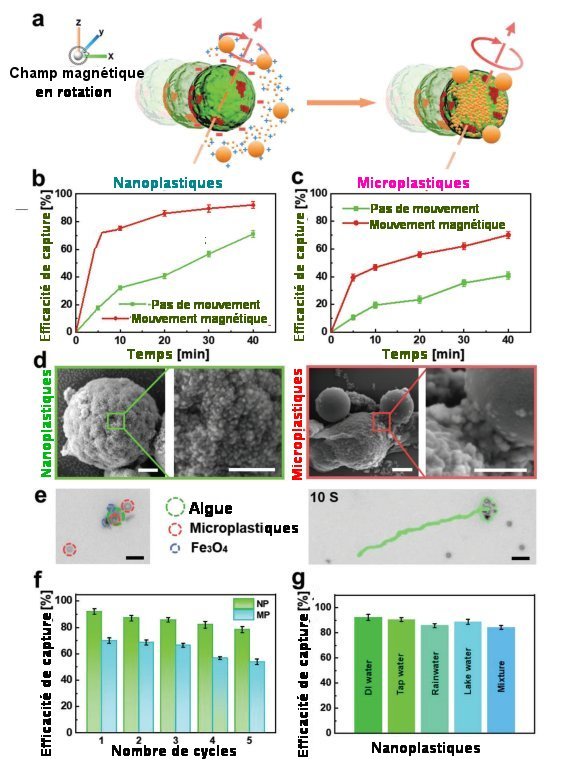
Fig.2. Capture de micro et nano plastiques
a) Schéma de la capture de micro et nano plastiques par les MARs Zsous champ magnétique tournant.
b) Efficacité de capture des nanoplastiques en fonction du temps
c) Efficacité de capture des microplastiques en fonction du temps
d) Images par microscopie électronique à balayage (MEB) de cellules d’algue après leur exposition à une suspension nano et micro plastiques. Barres d’échelle de 1 µm.
e) Images prises à 10 sec d’intervalle montrant le transport de microplastiques par un MAR. Barres d’échelle de 5 µm.
f) Réutilisation de MARs pour les nanoplastiques (NP) et les microplastiques (MP) retirés de l’eau après 5 cycles de capture.
g) Efficacité de récupération de MARS à partir d’eau désionisée, d’eau du robinet, d’eau de lac et d’un mélange de nanoplastiques et microplastiques.
Tiré de Biohybrid Magnetically Driven Microrobots for Sustainable Removal of Micro/Nanoplastics from the Aquatic Environment Xia Peng, Mario Urso, Martina Kolackova, Dalibor Huska, and Martin Pumera
Adv. Funct. Mater. 2024, 34, 2307477 Open Access
Ces microrobots, MARs, destinés à la capture des micro et nano plastiques sont formés de cellules d’algues décorées de nanoparticules de Fe3O4
L’algue Chlorella vulgaris choisie pour cela a une surface chargée négativement qui permet la fixation des nanoparticules de Fe3O4
chargées positivement. Il s’ensuit qu’au mouvement brownien des algues se substitue grâce à un champ magnétique un mouvement contrôlé et une manipulation collective. Ceci améliore la capture par attraction électrostatique des nano et micro plastiquese. Cette méthode démontrée en laboratoire devra être transposée à l’échelle des lacs et rivières et, probablement, avec des adaptions nécessaires, à celle des mers et océans en raison de leur salinité.
Pour en savoir plus :

