Un robot agrippeur biomimétique
De nombreux robots actuels utilisent des systèmes pneumatiques et des matériaux déformables pour réaliser une tenue optimale des pièces et un contrôle précis de leur mouvement. La saisie et le maintien de pièces à manipuler sont généralement assurés par des systèmes imitant la main ou par des tentacules genre poulpe. Ces dispositifs occupent un volume élevé et sont mal adaptés à la saisie de pièces d’un diamètre de l’ordre du mm.
C’est pour résoudre ce problème que des chercheurs de l’University of Georgia, Athens, Georgia, USA se sont inspirés des plantes à tiges « volubiles » qui s’enroulent autour de supports qui peuvent être les tiges d’une autre plante ainsi étouffée, voire étranglée. L’exemple le plus courant en France en est le liseron commun, on peut y rajouter, sous d’autres cieux, de nombreuses lianes tropicales.
Le système qu’ils ont mis au point à l’avantage d’occuper moins de place que ceux auparavant proposés. La figure ci-dessous montre une plante volubile et le système de robot agrippeur s’en inspirant.
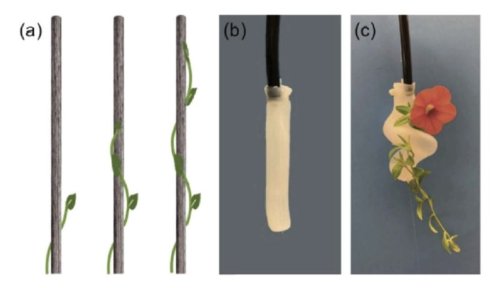
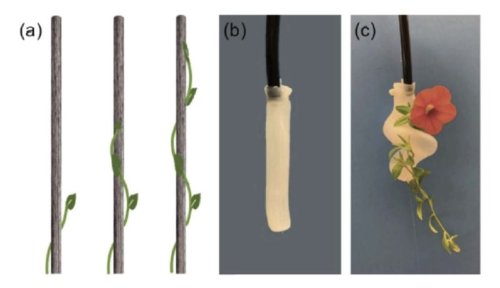
Fig.1. Illustration du mouvement d’enroulement
a) Enroulement des plantes volubiles; au fur et à mesure de la croissance;
b) L’agrippeur déformable en spirale à l’état de repos; on distingue, en couleur chair, son corps et, en noir, la canalisation permettant de lui appliquer une surpression.
c) Le même saisissant une fleur.
Tiré de Twining plant inspired pneumatic soft robotic spiral gripper with a fiber optic twisting sensor MEI YANG, LIAM PAUL COOPER, NING LIU, XIANQIAO WANG, AND MABLE P. FOK
Vol. 28, No. 23 /9 November 2020 /Optics Express 35158. Open Access
Structure et fonctionnement de l’agrippeur spiral déformable
Comme on le voit sur la figure 2(a)(b), l’agrippeur se compose d’un corps élastique en caoutchouc silicone (en gris clair) qui abrite un canal pneumatique hélicoïdal (en vert) dont la mise en pression entraînera une torsion du corps de l’agrippeur. Il entoure un barreau élastique en silicone (en brun) auquel est intégrée une fibre optique (en jaune) de mesure.
Sur la figure 2 c) on voit l’une des deux pièces demi-cylindriques du moule utilisé pour couler le corps souple de l’agrippeur spiral.
Un corps hélicoïdal solide (figuré en rouge) est fixé au centre du moule pour créer un canal hélicoïdal.
Le barreau élastique est aussi disposé au centre du moule. Après coulée du silicone et sa polymérisation, on retire le corps hélicoïdal, ce qui crée dans le corps de l’agrippeur un canal pneumatique hélicoïdal fermé d’un côté qu’on peut mettre en pression. Ce canal pneumatique va alors subir une torsion qui entraînera le corps de l’agrippeur, le faisant s’enrouler autour de l’objet à saisir.
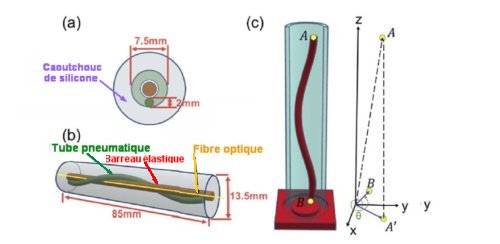
Fig.2. Structure de l’agrippeur et détails
a) Vue de dessus de l’agrippeur spiral déformable
b) Vue en perspective de l’agrippeur: le tube pneumatique figuré en vert est le canal que l’on va pouvoir mettre en pression.
c) Moules obtenus par impression 3D pour fabriquer l’agrippeur spiral.
L’angle θ, dit azimuthal, caractérise le canal pneumatique hélicoïdal au repos sans pression appliquée.
Tiré de Twining plant inspired pneumatic soft robotic spiral gripper with a fiber optic twisting sensor MEI YANG, LIAM PAUL COOPER, NING LIU, XIANQIAO WANG, AND MABLE P. FOK
Vol. 28, No. 23 /9 November 2020 /Optics Express 35158. Open Access
Le mouvement de l’agrippeur est caractérisé par l’angle de torsion avec lequel il va s’enrouler autour de l’objet. Cet angle peut atteindre 540°, c’est-à-dire un tour et demi.
Cet angle dépend surtout du rapport du module de Young du matériau du corps de l’agrippeur à celui du barreau élastique central et un peu de l’angle azimuthal (Fig.2.c).
En utilisant un modèle théorique, les chercheurs ont pu optimiser le système pour avoir la meilleure préhension. Leurs calculs les ont conduits à tester l’agrippeur avec des rapports des modules de Young du corps de l’agrippeur à celui du barreau élastique central allant de 1 à 1/4.
C’est un rapport 1/3 qui a été retenu pour le prototype final avec un diamètre de canal central de 2 mm . Une fibre optique de biréfringence élevée est intégrée dans le barreau élastique central. A la sortie de l’agrippeur, elle fait partie d’une boucle qui détecte par interférométrie (Fig.3.) la différence de phase créée par la torsion de la fibre.
Ce signal permet une mesure de l’angle de torsion, donc de la préhension et peut être utilisé pour une contre-réaction de contrôle.
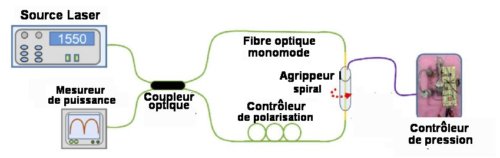
Fig.3. Montage expérimental du senseur à fibre optique
Tiré de Twining plant inspired pneumatic soft robotic spiral gripper with a fiber optic twisting sensor MEI YANG, LIAM PAUL COOPER, NING LIU, XIANQIAO WANG, AND MABLE P. FOK
Vol. 28, No. 23 /9 November 2020 /Optics Express 35158. Open Access
Une surpression dans le canal pneumatique de 0,67 MPa ( soit environ 6,7 fois la pression atmosphérique) donne une torsion de 540° (un tour et demi) pour un angle azimuthal de 450° ce qui permet à l’agrippeur de saisir et maintenir des objets de diamètres de 1 à 8 mm.
L’agrippeur spiral déformable est capable d’opérer dans un volume restreint et d’enserrer un objet avec une grande répétabilité et une précision élevée de mesure de la torsion.
Ce système, avec sa commande pneumatique à un seul canal, peut ainsi devenir un élément essentiel de nombreux robots.