
Un robot capable de survoler un terrain inégal et mouvant à l’aide de capteurs de flot optique
De nombreux robots miniaturisés ou des drones doivent pouvoir circuler de façon autonome même en présence d’obstacles mobiles comme des feuillages agités par le vent. Cela est difficile à obtenir avec les systèmes usuels de navigation inertielle qui reconstituent la trajectoire du mobile par intégration des signaux fournis par un accéléromètre. Deux chercheurs de l’Université d’Aix Marseille ont muni un hélicoptère modèle réduit de senseurs de flot optique mais non d’accéléromètre. Cet engin biomimétique ajuste son angle d’attaque et sa vitesse : il atterrit en toute sécurité tel les insectes diptères qu’il imite et qui n’ont aucun organe inertiel.
Pour tester ses possibilités, le mini robot est attaché à un bras léger muni d’un contrepoids qui tourne librement autour d’un axe installé au centre d’un laboratoire. Le système n’est mis en mouvement que sous l’action des pales de l’hélicoptère.

Fig.1. Photographie du robot dans son environnement de test. Il peut se déplacer circulairement dans un espace cylindrique dont le sol et le plafond sont recouverts de photographies de paysages naturels. L’hélicoptère est accroché à l’extrémité d’un bras léger muni d’un contrepoids. Ce bras est mû en élevation et en azimuth par les seules forces de portance et de poussée créées par les rotors du robot. La piste circulaire inférieure est munie d’un obstacle long de 4,5 m et de 38 cm de haut. Il comprend une rampe de 2,5 m de long montant avec une pente de 9°, suivie par une partie plate de 1 m de long puis d’une rampe de descente de 21° de 1 m de long. Ce sol artificiel peut être mis en rotation dans un sens ou dans l’autre ou encore monter ou descendre et cela indépendamment du mouvement de l’hélicoptère. On a figuré en bleu le champ de vision des senseurs optiques. Crédit Bioinspiration & Biomimetics.
Le robot BeeRotor II, mini hélicoptère d’un poids de 80 g et d’une envergure de 47 cm, ajuste son altitude, son angle d’attaque et sa vitesse en utilisant un senseur optique, un gyroscope mesurant la vitesse de variation de l’angle d’attaque et enfin un capteur de vitesse à l’exclusion de tout système inertiel de navigation.
Un système de référence inertiel utilisé pour la navigation calcule la position et l’orientation du mobile à partir des mesures d’accélération et de vitesse angulaire.
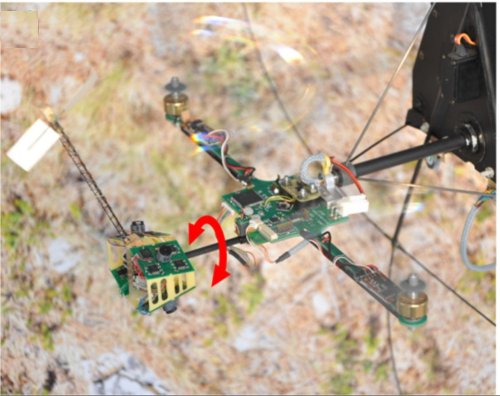
Fig.2. Photographie de BeeRotor II en vol. On distingue les deux
pales de l’hélicoptère birotor et, à gauche, le senseur optique monté
sur un axe permettant sa rotation. au fond, à droite, on aperçoit l’hélice blanche du capteur de vitesse de l’air. Crédit Bioinspiration & Biomimetics.
Pour mesurer le flot optique, l’engin est équipé d’un senseur optique inspiré des ocelles composés des mouches. Des rangées de photodiodes placées sous des microlentilles sont réparties de haut en bas pour constituer l’« œil » de l’appareil (Fig. 3 b). La vitesse à laquelle un objet perçu défile d’une rangée de diodes à l’autre fournit la vitesse angulaire du flot optique. Le champ de vision du senseur optique atteint 180° dans le plan vertical. Lorsque le robot modifie son angle d’attaque, un automatisme permet de garder à son œil la position optimale en le faisant pivoter autour de son axe (flèches rouges sur la Fig.2).

La figure suivante montre la vue de dessus de la partie principale du drone, une figure agrandie de son « œil » et le capteur de vitesse placé au bout d’un léger bras.
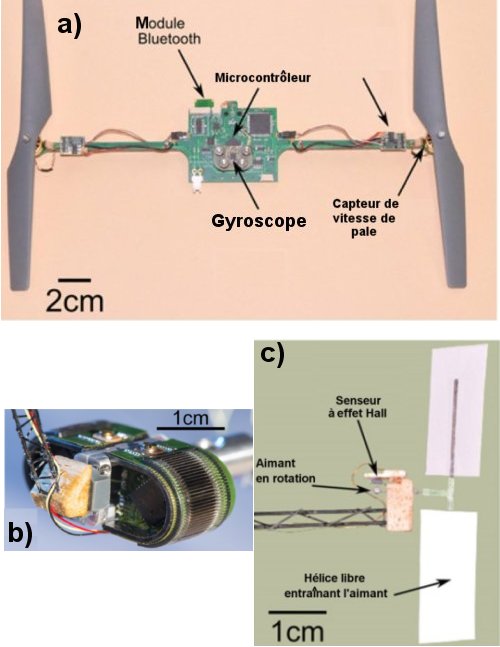
Fig. 3. Détails de l’appareillage.
a) Vue de dessus de l’hélicoptère. 47cm de long et 80g de poids total.
b) Détail du senseur optique. Son volume est de 2, 2 cm3, son poids de 1,75 g. Un moteur permet de l’orienter autour de l’axe qu’on aperçoit à droite.
c) Détail du capteur de vitesse. Une hélice libre entraîne un aimant tournant devant un senseur à effet Hall. Son poids est inférieur à 0,5 g. Crédit Bioinspiration & Biomimetics.
BeeRotor possède trois circuits de contre-réaction qui agissent comme trois différents réflexes. Le premier modifie son altitude pour suivre le plancher ou le toit du local d’expérience. Le second contrôle la vitesse du robot afin de l’adapter aux formes et tailles du couloir à travers lequel il vole. Le troisième stabilise l’œil selon la pente locale de l’environnement en agissant sur le moteur qui actionne le bras du senseur optique. Cette dernière régulation permet au robot d’avoir toujours le meilleur champ de vision, quel que soit l’angle d’attaque. Le BeeRotor arrive ainsi à éviter des obstacles à très forte pente sans utiliser d’accéléromètre et sans mesurer directement son altitude et sa vitesse
La vidéo suivante présente quatre phases différentes du vol du robot :
- Suivi du sol avec un relief de forte pente.
- Suivi du sol lorsque ce dernier est animé d’oscillations verticales et d’une rotation à la vitesse de 30 cm/s
- Variations rapides extérieures de l’angle d’attaque de l’engin.
- Atterrissage automatique.
Le BeeRotor permet d’avancer une nouvelle hypothèse biologique pour expliquer comment les insectes contrôlent leur vol sans posséder d’accéléromètre. On peut respectivement faire correspondre à l’œil composé, aux haltères et aux antennes des insectes ailés le senseur de flot optique, le capteur gyroscopique et le capteur de vitesse du BeeRotor.
Ce système peut aussi avoir des applications industrielles. Les systèmes inertiels qui utilisent des accéléromètres sont trop volumineux et lourds pour de minuscules robots comme, par exemple, ceux destinés à inspecter des conduites de fluides. Dans le domaine spatial ces systèmes légers pourraient être utilisés comme secours en cas de panne des systèmes inertiels.
Pour en savoir plus :
Flying over uneven moving terrain based on optic-flow cues without any need for reference frames or accelerometers
Fabien Expert and Franck Ruffier
Aix Marseille University, CNRS, ISMUMR7287, F-13288, Marseille, France
Bioinspiration & Biomimetics, 10 (2015) 026003

